Lineaarrobot ehk ristkoordinaatrobot
Vaatame lähemalt, mis on lineaarroboti iseloomulikud erinevused võrreldes teiste robotitüüpidega, milline on selliste robotite täpsus ja milliste seadmete jaoks sobib selline roboti ehitustüüp kõige paremini.
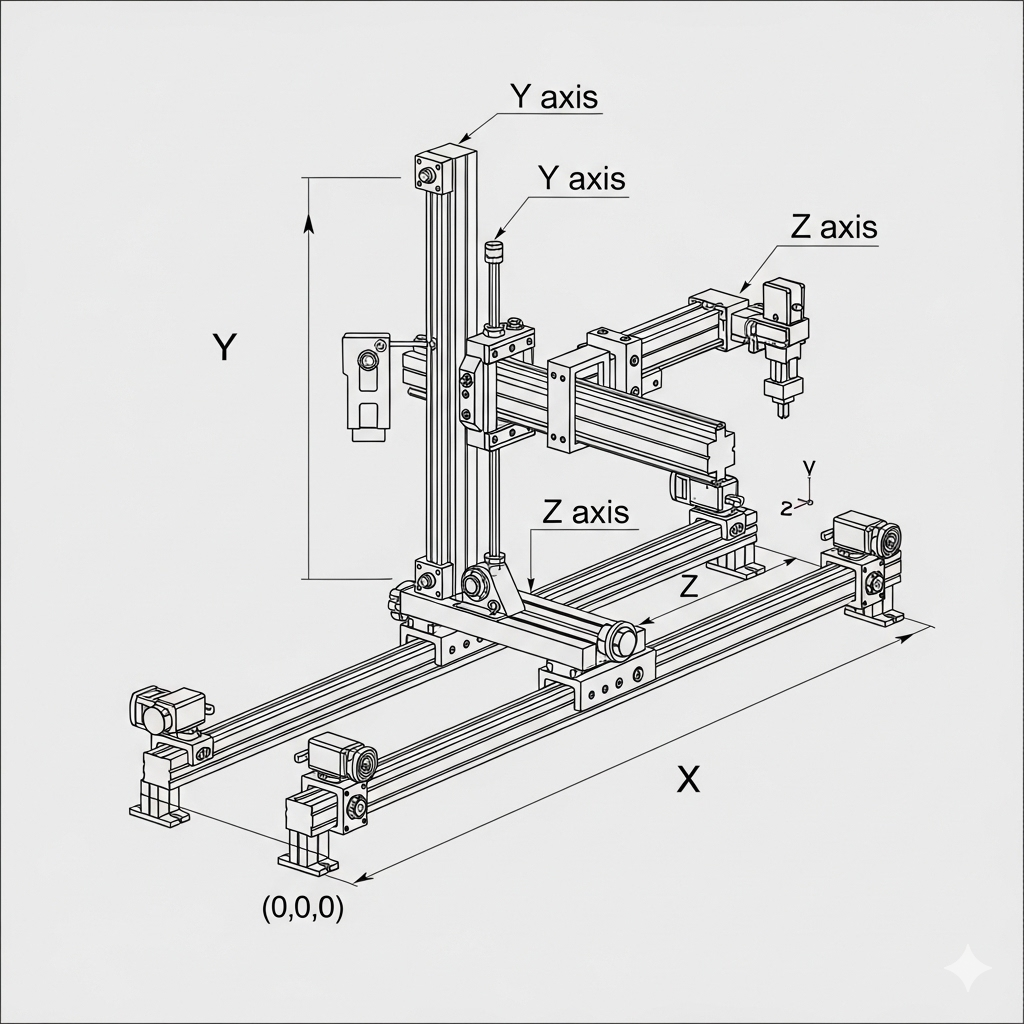
Lineaarrobotid erinevad teistest robotitüüpidest peamiselt oma ehituse ja liikumise poolest. Kui enamik tööstusroboteid kasutab pöörlevaid liigeseid, siis lineaarrobotid ehk kartesiaanrobotid liiguvad kolmel sirgjoonelisel, teineteisega risti oleval teljel (X, Y ja Z). See sarnaneb ristkoordinaatide süsteemiga, millest tuleneb ka nende teine nimi.
Lineaarroboti täpsus Lineaarroboti suur täpsus tuleneb mitmest tegurist:
Täpsusklasside puhul on oluline eristada absoluutset täpsust (kui lähedal on robot soovitud asukohale) ja korduvuse täpsust (kui lähedal on robot iga kord samasse sihtpunkti naastes). Korduvuse täpsus on üldiselt olulisem ja lineaarsüsteemide puhul väga kõrge, sageli vahemikus ±0,02 mm kuni ±0,1 mm või isegi parem.
Kasutusalad ja masinad Tänu oma suurele täpsusele ja võimele kanda suuri koormusi on lineaarrobotid laialdaselt kasutusel mitmetes valdkondades, kus on vaja täpset positsioneerimist ja suurt jäikust.
|
 |
Monteeri lihtsalt ja kiiresti
Riistvara montaaž on jaotatud etappideks ja toetatud õppevideodega. Vaata lähemalt.
Tarkvaratugi
Loe riistvaralist portide lugemist ja muutujate defineerimist toetava tarkvarateegi kohta