Laborirobot
Biotehnoloogialaboris on vaja automatiseerida pipeteerimisprotsess kolme lineaarmootorit kasutava ristkoordinaatroboti abil. Mootorite lülititele on vaja kirjutada lihtne programm, mida juhitakse esimeses robotiarenduse etapis käsitsi, lülitite i1, i2 ja i3 abil. Kõigil lülititel on režiim sees-väljas, mis toimivad muutrežiimis sarnaselt nagu harjutuses "Lambilüliti". Mootorite tööst annab märku signaallamp, vastavalt o1, o2 ja o3 väljundites.
Lineaarmootoril on kaks klemmi, millele tuleb rakendada alalisvoolu + ja - polaarsused. Liikumise suunda saab muuta mootorite klemmidel polaarsust vahetadades, selleks on sisendina nupp i4 nimetusega "Reevers", mis toimib samuti muutrežiimil. Vaikimisi on mootorid edaspidikäigul, reeversi rakendamisest ehk mootorite tagurpidi töölepanekust annab märku signaaltuli o4.
Programmi arenduse selguse ja testimise lihtsustamiseks lisa programmile jadaühenduse (ingl. Serial port) kaudu väljundlogi, mis annab iga režiimimuutuse kohta märku, millist lülitit kasutati ja millisesse olekusse selle lüliti režiim muutus. |
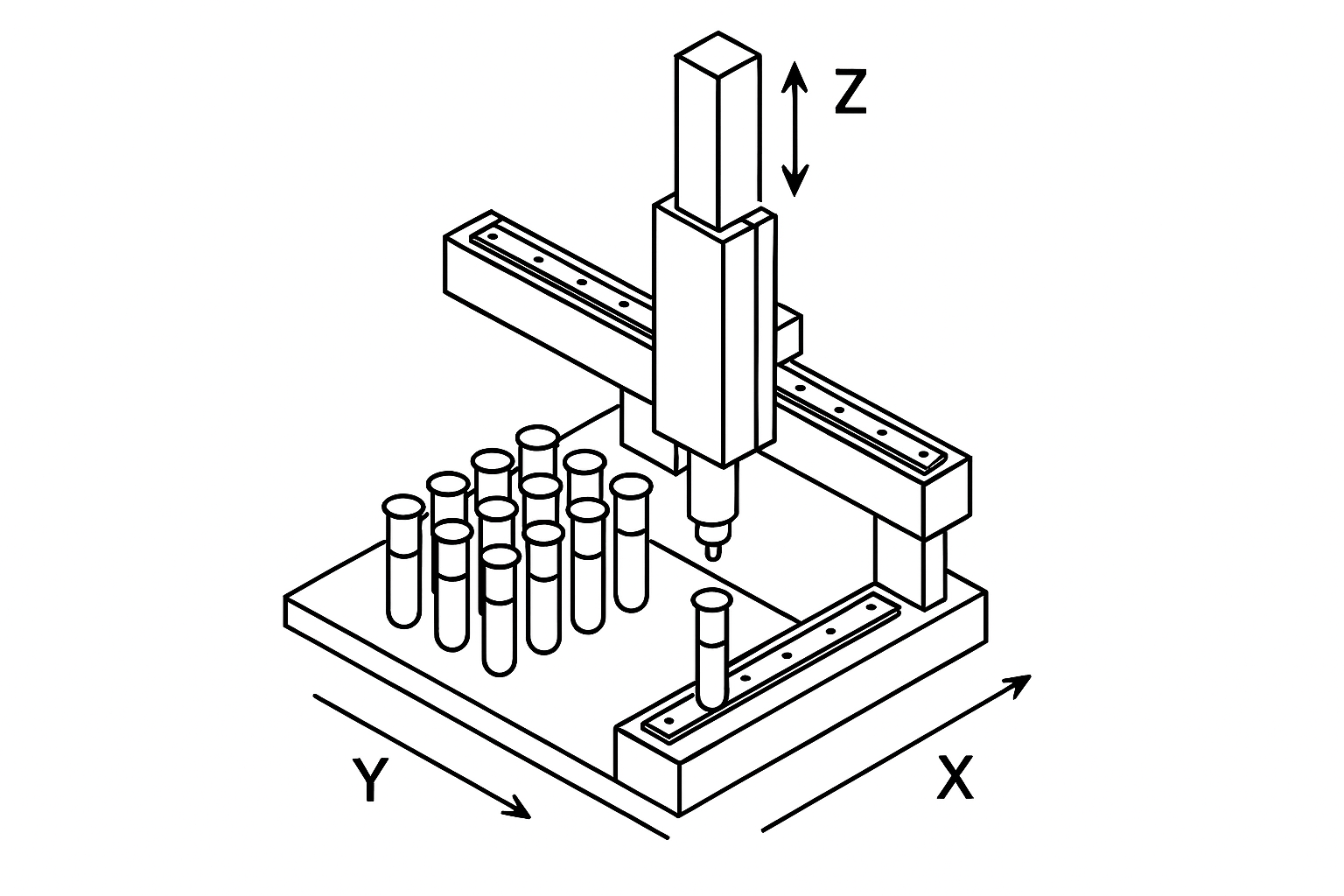 |
Hea teada: Ristkoordinaatrobotit võib nimetada ka kartesiaanrobotiks (ingl. Cartesian robot) või ka selle tööpõhimõtte järgi lineaarrobotiks ehk pukkrobotiks. See robot töötab kolmel ristuval teljel: X, Y ja Z. Lineaarrobot on tüüpiline tööstusliku roboti näide, mida kasutatakse tootmises ja automatiseerimises. Erinevalt liigendrobotitest, mis meenutavad pigem inimkäsi, liigub lineaarrobot mööda sirgjoonelisi siine. See liikumisviis tagab suure täpsuse ja jäikuse, muutes selle ideaalseks näiteks tootmisliinidele, 3D-printimiseks ja muudeks rakendusteks, kus on vaja täpset positsioneerimist.
Loe lähemalt, millised on ristkoordinaatroboti iseloomulikud ehituslikud omadused, mille poolest see on täpsem ja milliste seadmete jaoks on kartesiaanrobotit kõige rohkem kasutatud. |
Monteeri lihtsalt ja kiiresti
Riistvara montaaž on jaotatud etappideks ja toetatud õppevideodega. Vaata lähemalt.
Tarkvaratugi
Loe riistvaralist portide lugemist ja muutujate defineerimist toetava tarkvarateegi kohta